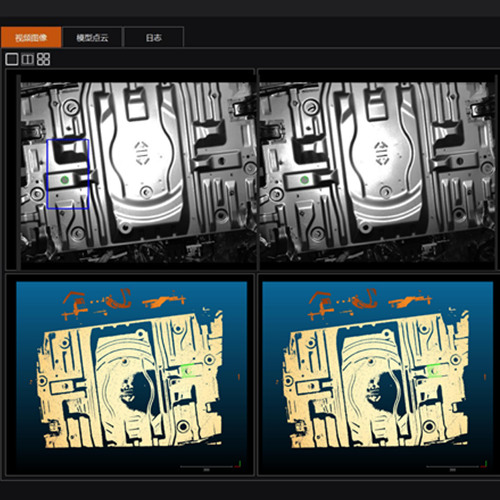
眸视科技SLAM方案支持激光雷达SLAM,也支持视觉SLAM。同时眸视科技支持激光雷达+视觉融合SLAM方案,也就是在SLAM中同时使用激光雷达与摄像头进行定位与导航。
激光雷达与摄像头属于不同传感器类别,他们分别有各自的优缺点:
激光雷达的优点是能提供准确的距离信息,同时因为激光雷达是自身发光,所以激光雷达能够在完全黑夜的环境中工作。激光雷达的缺点是采样点比较稀疏(比如某些单线激光雷达一个scan只有360个测量点),同时由于激光雷达SLAM方法取决于对齐几何点云,在几何退化场景中(例如长直的隧道)可能会导致SLAM失败。
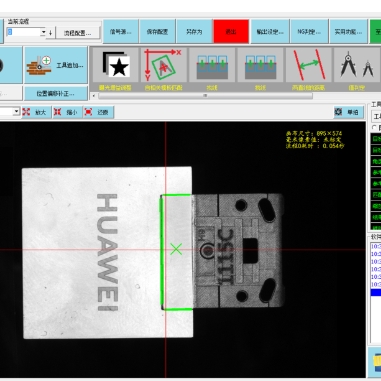
摄像头能提供丰富的环境信息(RGB)并且信息相对比较稠密(比如普通单目摄像头能提供640*480的像素点的图像信息)。摄像头的缺点是对环境照明条件敏感,比如在黑暗的环境中无法工作。同时在没有特色的环境,如阴天,地面积雪,全白色的墙,也会导致基于视觉的SLAM陷入困境。
激光雷达+视觉SLAM融合方案能够弥补激光雷达
与摄像头各自的弱点:
激光雷达+视觉SLAM融合方案能够适应更多复杂的环境,使SLAM能够在多种环境下工作:
 查看
查看 查看
查看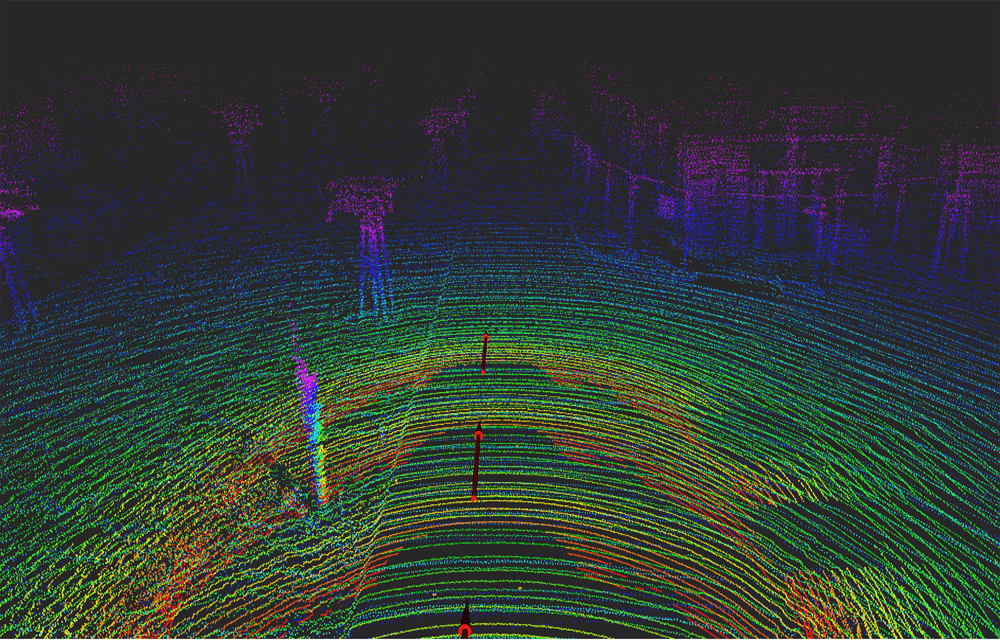 查看
查看

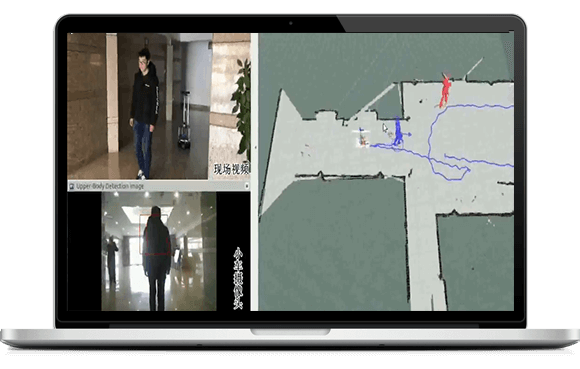
北京眸视科技有限公司作为国内领先的视觉追踪研发单位,实现在未知环境中(未制作地图情况下)追踪目标(人 )行走,实现对指定目标的检测和实时跟踪,做出前进、后 退、左转和右转等基本操作,并且和目标保持1.5米的距离。
智能旅行箱、工厂物品托运、家庭智能监控、特定行人轨迹追踪等。
(1)机器人对行人目标的跟随;
(2)机器人保持和追踪目标保持一定范围,在追踪过程中可实现避障;
(3)可以实时获取机器人正前方的场景信息,识别行人信息;
(4)将机器人行走过程中周围环境制作成地图;
 查看
查看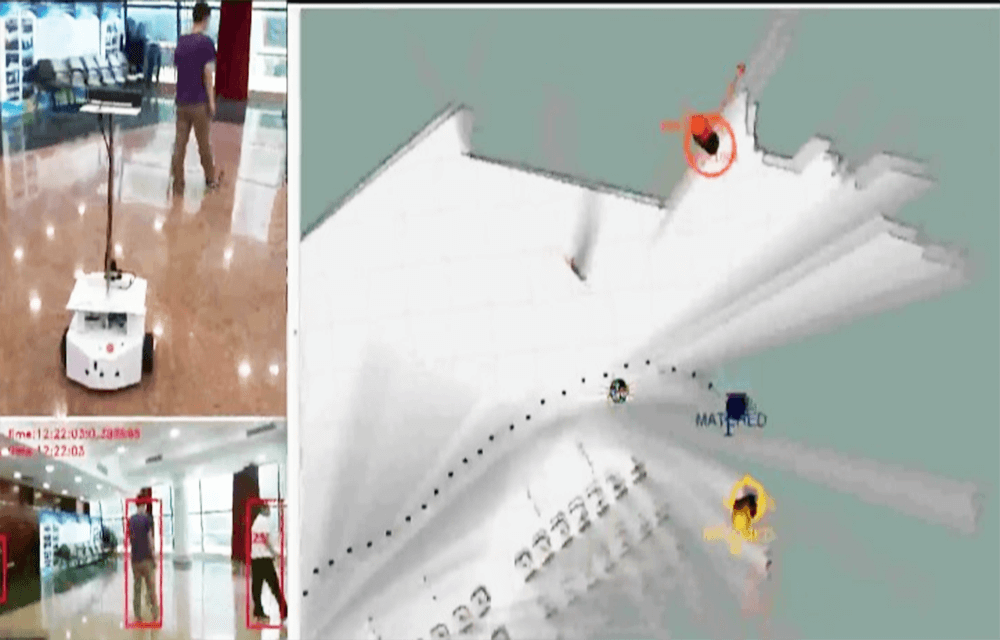 查看
查看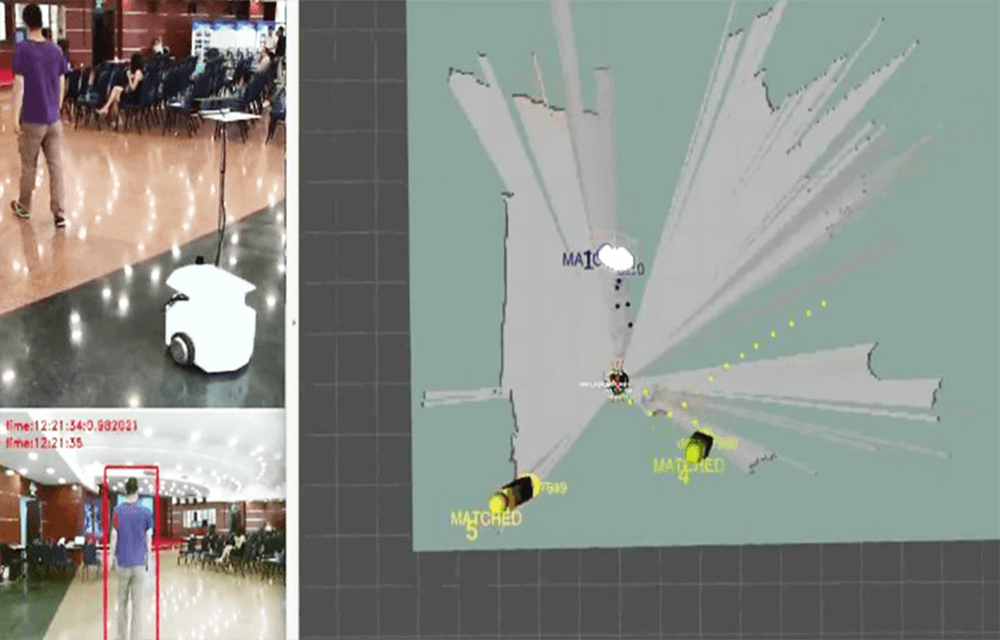 查看
查看
 如果您对此感兴趣,欢迎问问展商吧!
暂无数据暂无数据如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
暂无数据暂无数据如果您对此感兴趣,欢迎问问展商吧!



 CHN
CHN EN
EN