首页
领域馆
工业软件
工业自动化
智能装备
工业互联网
工业服务
工业IT
展商
展品
主题展
展览
行业
领域
需求
资讯
选型
云栈
工业软件库
商城
首页
领域馆
工业软件
工业自动化
智能装备
工业互联网
工业服务
工业IT
展商
展品
主题展
行业
领域
需求
资讯
选型
云栈
工业软件库
商城
观众入口
展商入口
CHN
CHN
EN
扫一扫
下载网博会APP
展品
展商
供需
动态
APP
展商
展品
行业
领域
需求
资讯
工业软件馆
工业互联网馆
展商
展品
行业
领域
需求
资讯
观众入口
展商入口
您好,lingshiguang
账号中心
退出
商家VIP
CHINESE
CHINESE
ENGLISH
扫一扫
下载网博会APP
产品
厂商
供需
动态
APP
汉航(北京)科技有限公司
资讯
多场耦合可靠性控制系统之一:声振动耦合疲劳试验--汉航NTS.LAB VACS闭环控制系统
发布时间:2025-01-09
关键词:
多场耦合
声振耦合
疲劳试验
来源:网站
作者:汉航
利用汉航NTS.LAB VACS闭环控制系统进行声振动耦合疲劳试验,能够弥补噪声试验中低频段考核不充分而随机振动试验中高频段考核不充分的缺陷,对产品考核更加充分、全面,为产品的优化、可靠性验证提供更加贴近真实工况的试验数据。
1
引言
多场耦合问题在实际工程中具较强的复杂性,也是国内外研究的一个热点问题。它广泛存在于诸多工程领域中。如推力、噪声、振动、高温、电磁干扰等共同作用的结构性能和可靠性问题,其特点是多种载荷之间存在强耦合效应。耦合问题是一个相对比较复杂的问题,由于耦合的工况难以形成固定形式,预先进行的仿真分析可靠性及准确性仍需加强,模拟构建真实的发射环境就成为必须,汉航致力于多物理场耦合控制可靠性试验系统的研发,以期对工程产品进行精准的可靠性控制考核。
在航空航天产品的地面试验验证中,需要重构真实的发射环境。事实上,飞行器在发射、上升、巡航、再入过程中会同时受到振动、声、热载荷的多重影响。在航天技术发展的早期阶段,往往只通过单次随机振动试验或者噪声试验对产品进行可靠性验证。随着空间技术的不断发展,飞行器功能更多元、速度更快等特点,越来越多的具有大表面积的航天器,如太阳能机翼或天线阵列,被广泛地设计用于长期任务,因此,根据复杂的环境分解(单一进行振动或者声学疲劳试验)来推断构件的测试水平是不准确的,这可能导致高估或低估结果,甚至导致强度和刚度设计不合适。因此迫切地需要更加精准地复现其振动噪音的试验环境,验证其动态响应及可靠性。
航空航天产品
由于噪声作用在产品上的最终结果亦是导致结构振动,所不同的是噪声能量主要集中在中高频,同时由于噪声载荷是空间激励,从而使得薄壁结构以及与之相连的结构更为敏感。但是当噪声与振动发生耦合后,产品的振动响应将叠加,从而更易导致产品发生故障。因此,声振耦合控制测试技术在动力环境模拟中受到了愈来愈多的关注,对系统进行组合振动
-
声学试验,考察实际中声振联合耦合效应的影响,是火箭、卫星、导弹等型号研制过程中的重要试验项目之一,对结构可靠性和寿命的提高、服役过程中维修费用的降低有着重要的意义。
2
声
-
振疲劳耦合测试系统的组成
声
-
振疲劳耦合测试系统由混响室子系统和电磁激振子系统组成,其中每个子系统都有一个数据采集控制器来实现参考谱的控制,具体如下。
2.1
振动控制系统组成
振动控制系统主要由以下几部分组成
:
振动台
:振动台负责产生振动。能够根据需要调整振动的频率、振幅和方向,实现不同的振动环境
。
功率放大器
:功率放大器用于放大控制信号,驱动振动台产生所需的振动。它确保振动台能够产生足够的载荷来模拟实际的振动工况
。
振动
控制系统:负责对振动参数进行调节和
PID
控制,能够实现对振动频率、振幅、振动方向等参数的实时精准调整和控制,以满足不同试验需求。
传感器与测量设备
:传感器(如加速度传感器、位移传感器等)用于采集振动数据,控制、监测振动台及被试件的实际振动情况。振动控制仪用于处理和分析这些数据,以评估产品的性能和可靠。
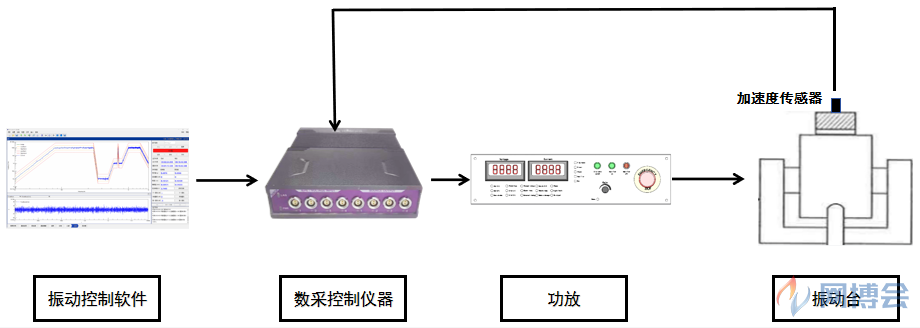
振动控制示意图
振动控制仪中输入试验条件谱,产生振动波形,功放放大后,驱动振动试验机振动,加速度传感器感知加速度量级,反馈给振动控制仪,实现实时闭环振动控制。
2.2
声学控制系统组成
声学控制系统与振动控制系统类似,主要由以下几部分组成
:
混响室
/
行波管
/
消音室
:提供不同的声学环境,可根据声压级及试验件大小进行选择
。如
用行波管装置试验时,一般为材料元件或者较小的结构部件的高声强行波场试验;在混响试验室内试验时,一般为成型产品,尺寸较大的混响场各点等强度的驻波声载荷试验;若需要重构结构在扩散场下声场环境,准确复现不同位置的声载荷(每个控制点声载荷谱不同),则可以选择消音室进行。
电声
/
气源喇叭
:产生噪声,能够根据需要调整噪声的频率和声压级,模拟不同的噪声环境,一般低声压级选择电声喇叭(小于
145dB
),高声压级选择气源喇叭(
145dB-180dB
等)
。
功率放大器
:用于放大驱动信号,驱动喇叭产生所需的噪声声压级,确保能够产生足够的声压级来模拟实际的噪声环境工况
。
声学
控制仪
:负责对噪声参数进行设置、调节和控制,能够实现对噪声频率、声压级等参数的实时调整或手动调整,以满足不同试验需求。
麦克风与测量设备
:用于采集噪声数据,控制、监测声场环境,以评估产品的性能和可靠性。
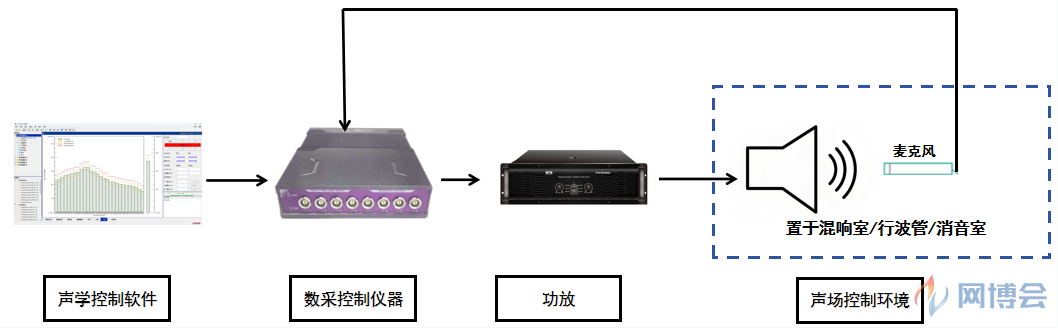
声学控制示意图
声学控制仪中输入试验条件,产生噪声谱,功放放大后,驱动喇叭产生设定的噪声频谱,麦克风感知噪声量级,反馈给控制仪,实现实时闭环噪声控制。
2.3
控制原理
汉航
NTS.LAB
声
-
振
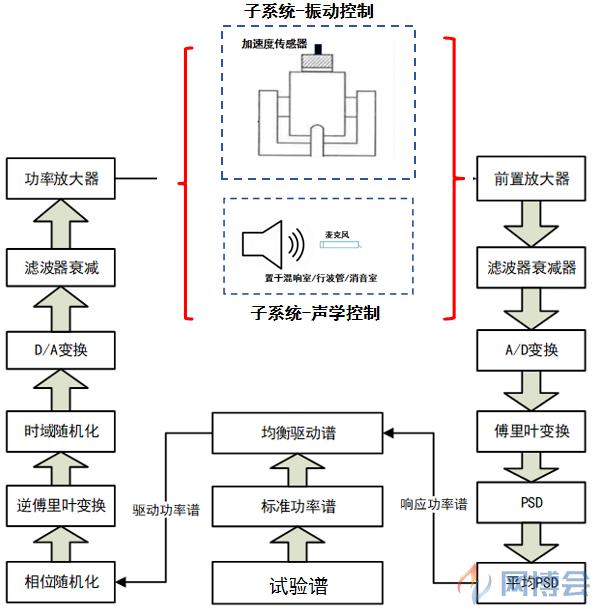
疲劳控制系统基于数字式闭环控制原理,实现声振动载荷幅值、频率精确控制,其工作原理如下图所示。
数字式闭环声
-
振控制系统工作原理
试验时,将标准参考谱(如
GJB150
规定的振动噪声试验谱)及相关试验参数输入到控制系统中,以较低电平分别驱动振动台振动
/
声源系统发声。在试验段安装控制加速度传感器
/
传声器,测量该位置处振动加速度
/
声压信号,并反馈到振动
/
声学控制系统。将反馈的时域振动声压信号通过傅里叶变换转换为振动声压功率谱密度,并与标准参考频谱相比较,如有不同则修正驱动谱。该过程反复迭代进行,直到满足试验加载频谱要求,从而实现闭环精准控制。
3
声振耦合疲劳试验案例
为了重建某款产品真实的发射环境,即考核产品同时受到振动和声载荷的影响,监测各个关键位置的响应及可靠性(如是否振动响应过大、是否发生疲劳损伤),某单位采用汉航
NTS.LAB VCS
随机控制和声学控制模块进行测试。
该测试系统由混响室子系统(声学控制)和振动台子系统(振动控制)组成,产品通过配套工装安装在一个振动台面上;混响室内有
2
组电声喇叭,可提供
141dB
声压级控制。
本次试验分别在振动台面上粘贴
2
个加速度传感器作为控制反馈信号,其余关键位置粘贴相对应的加速度传感器作为响应监测;声学控制采用两个麦克风传声器作为反馈信号用于平均控制。目标谱(随机振动和声学载荷谱)的获取是通过发射时采集得到的时域数据,并通过频谱分析转换成
PSD
谱,输入到各自的系统中,进行闭环控制试验。
表
1
:随机载荷谱示例
表
2
:噪声载荷谱示例
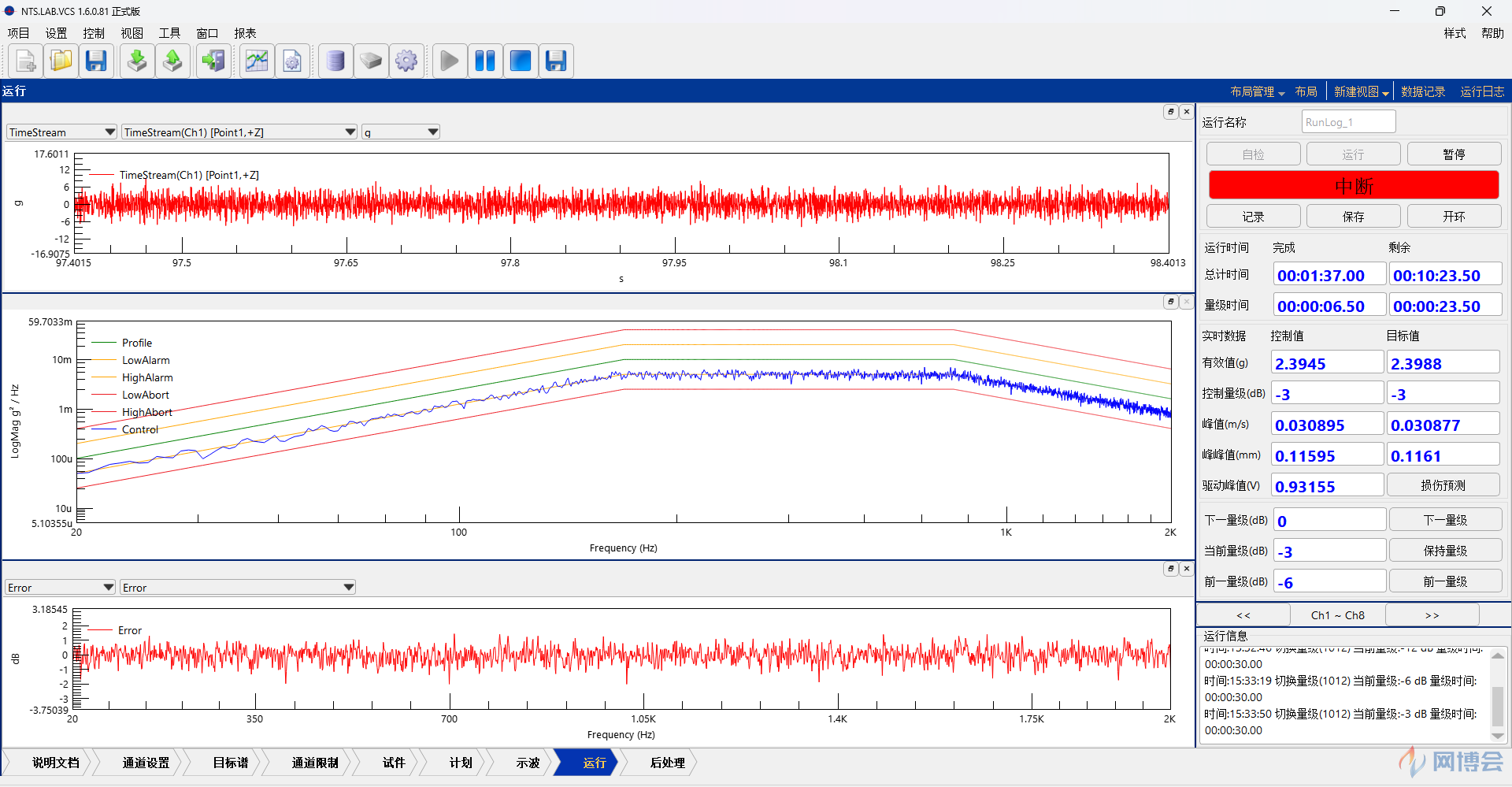
随机载荷实时控制示例图
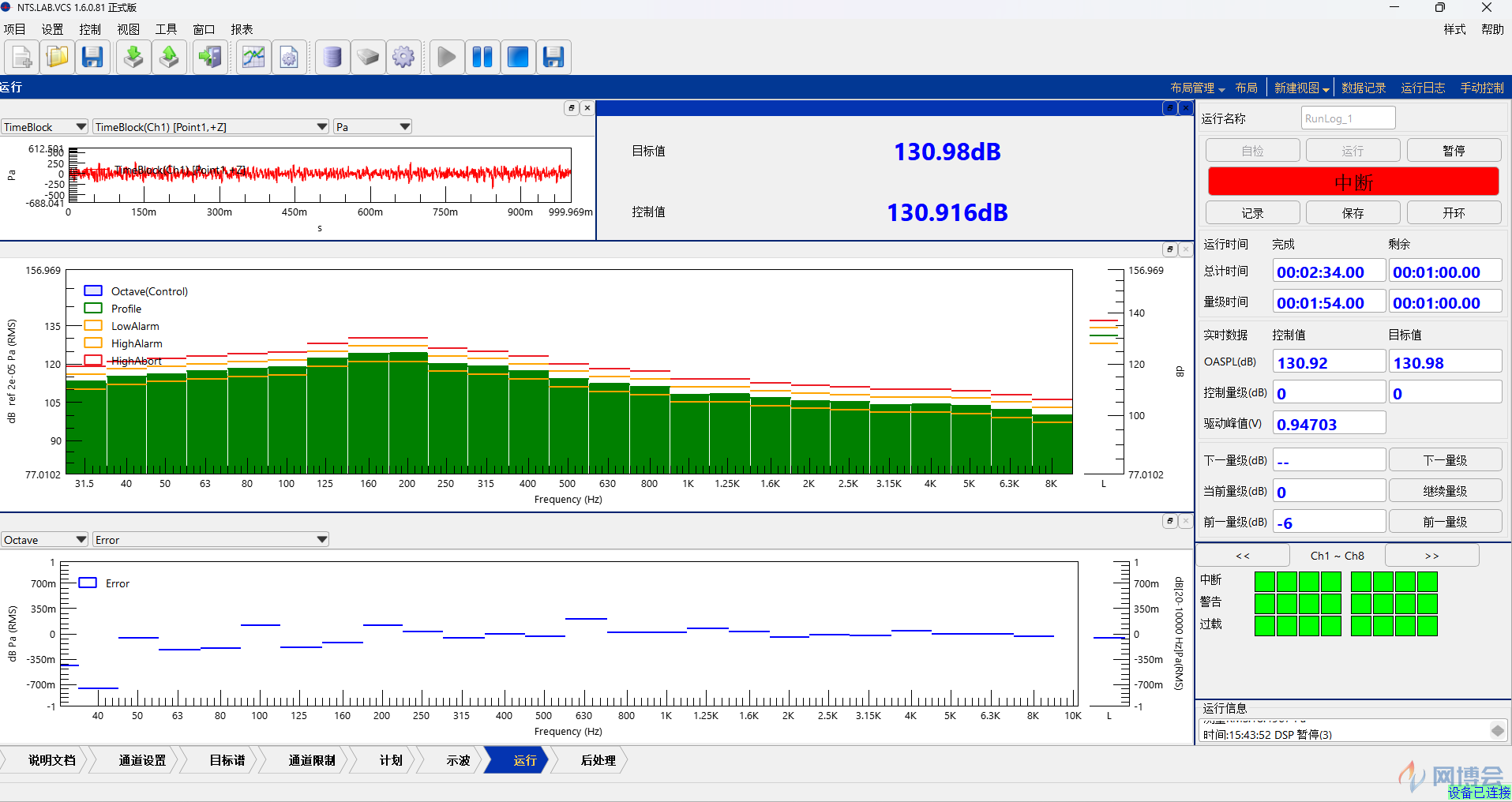
噪声载荷实时控制示例图
从上图可以看出:实时振动控制各个频点能量控制误差在
1%
之内,实时噪声控制各个频带误差在±
1dB
之内,精准复现产品所承受的振动声学环境,可进一步考察各个监测点在声振耦合试验环境下,其振动量级的表现。
结果表明:在进行噪声与随机振动组合试验时,在低频段随机振动激励更能激发结构的模态响应,而在中高频段噪声激励更能激发结构的模态响应。声
-
振组合试验弥补了噪声试验中低频段考核不充分而随机振动试验中高频段考核不充分的缺陷,对产品考核更加充分、全面,为产品的优化、可靠性验证提供更加贴近真实工况的试验数据。
4
总结
航天器结构和组件有些易受随机振动影响,有些易受噪声影响,因此选择任何一种试验方法都不可能完全暴露所有的潜在失效模式。将声振试验耦合置于混响室内,根据噪声、振动试验条件对声振试验系统分别进行控制,可实现卫星产品声振耦合环境模拟,提供更加真实、可靠的试验数据。






 CHN
CHN EN
EN