麻袋体积大且不规则,原有的人工搬运方式效率低,且传统方式无法有效识别。另工人难招,人工拆垛成本高。
每天需要将大量的袋装原料,统一收纳到存储仓中。
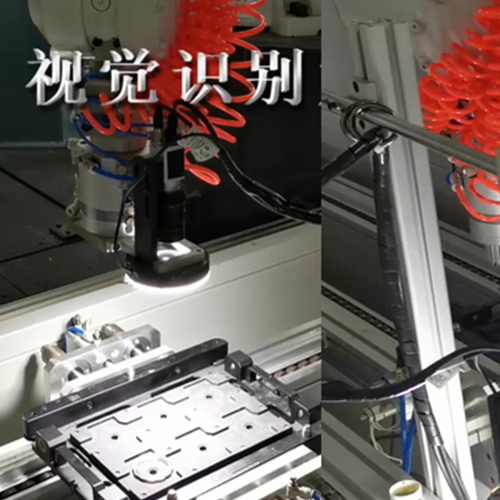
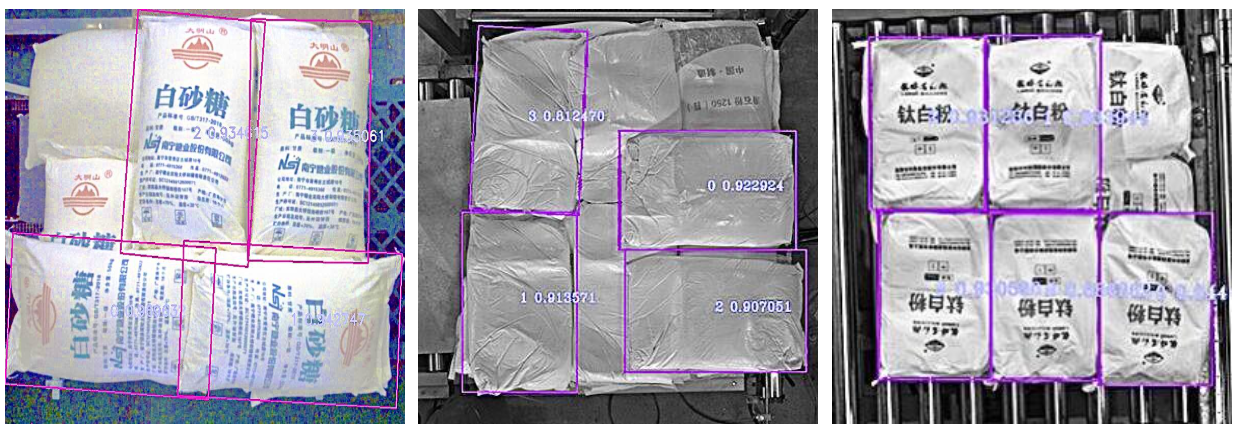
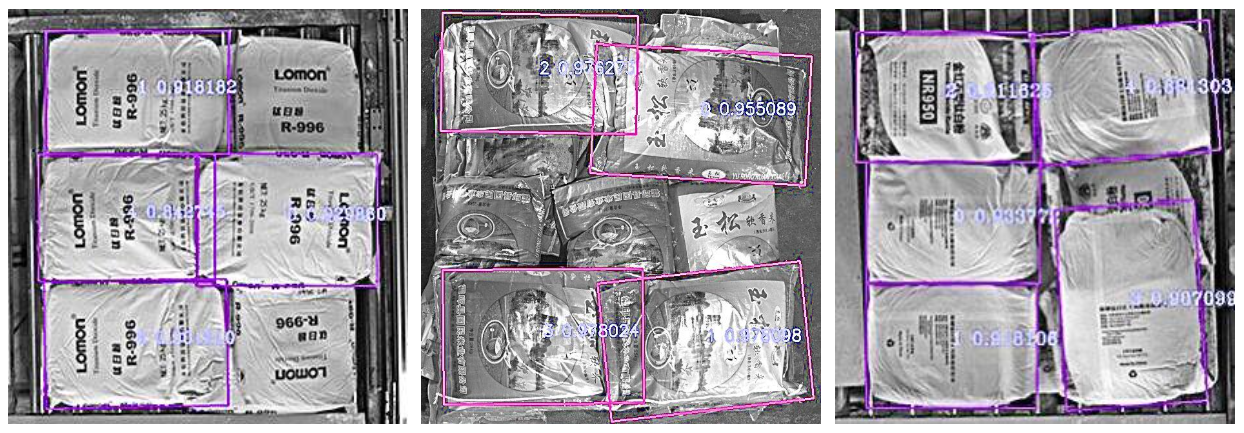
针对以上问题采用视觉CS-RT-L21相机引导机器人拆垛加深度学习的方案,可快速应对数量众多的不同尺寸和图案的麻袋。有效替代人工,提高生产效率。
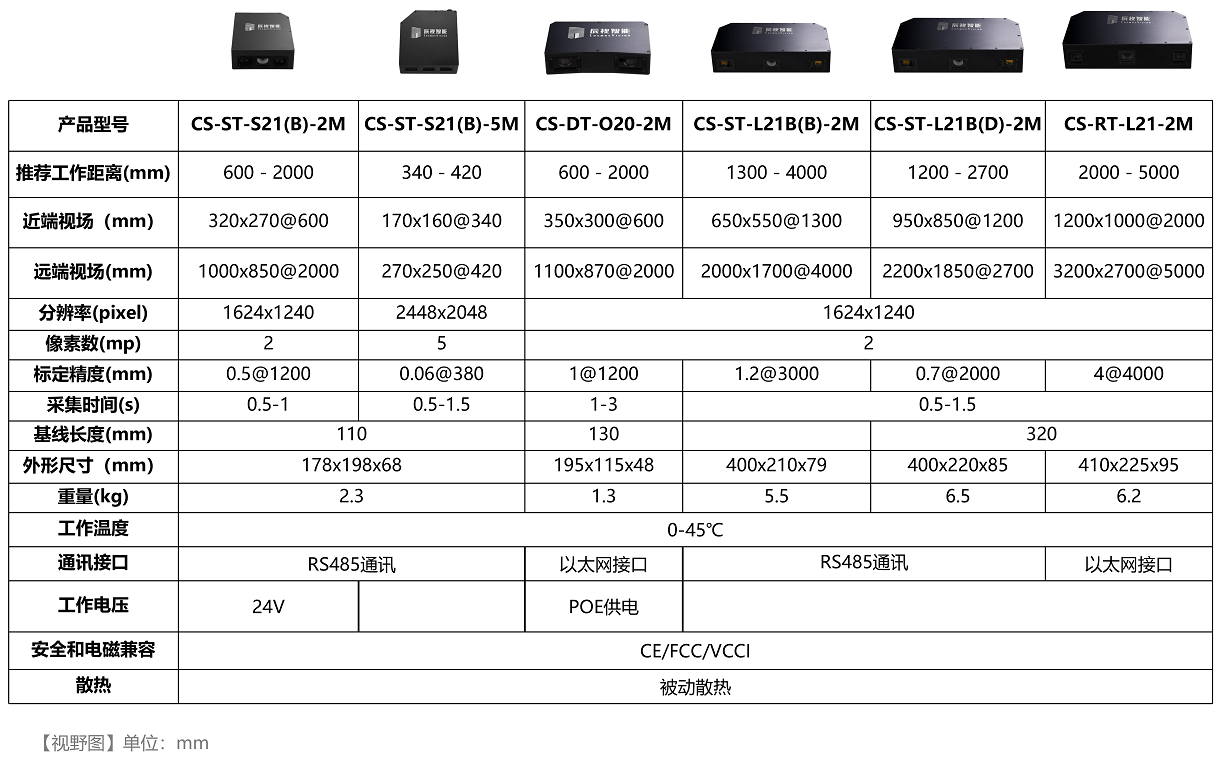
辰视工业级3D相机
高速度 · 高精度 · 稳定 · 耐用
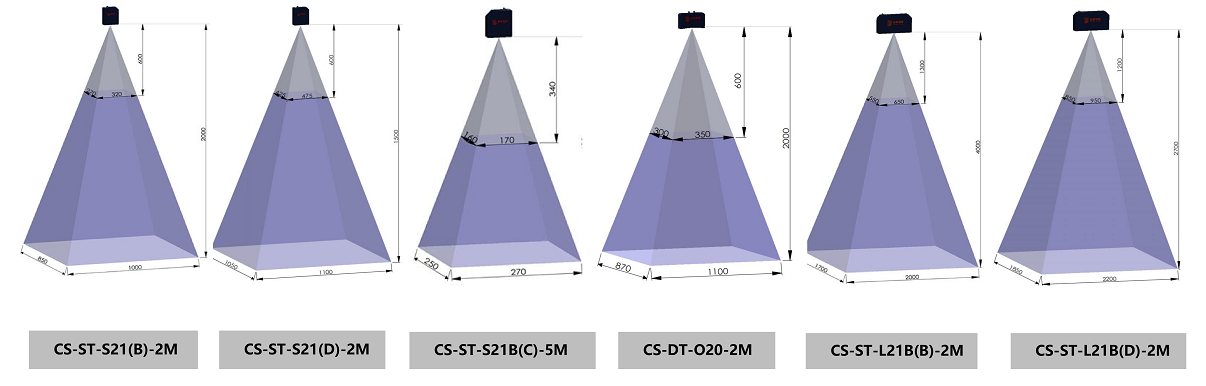
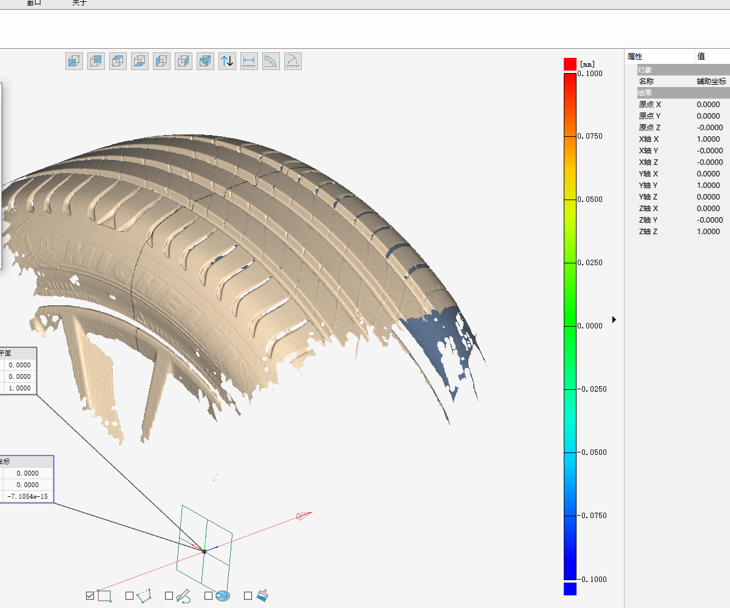
辰视工业级3D相机
可对各类袋状货品实现高质量图像

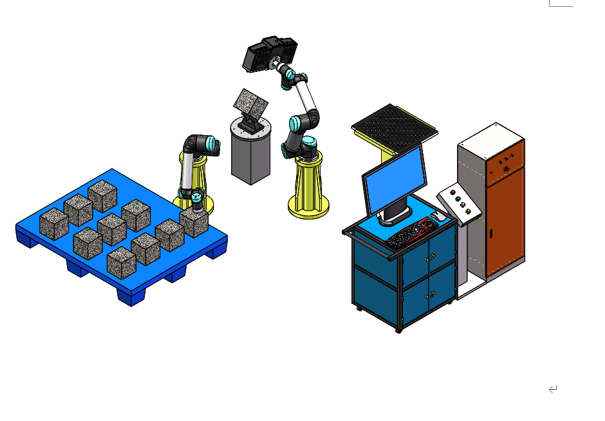
Csv3DPilotSystem
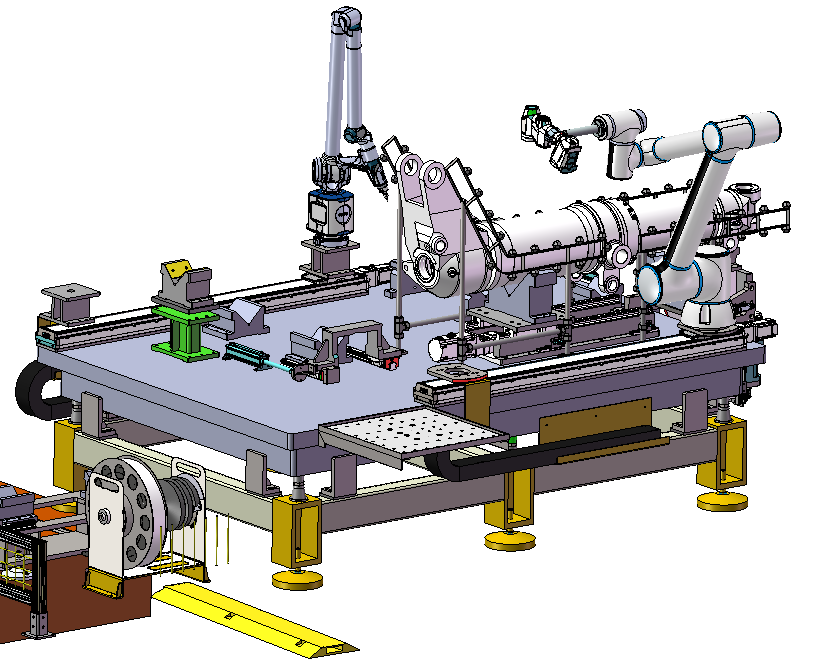
三维视觉引导拆码垛平台
Csv3DPilotSystem为新一代三维视觉引导软件平台,系统内置三维视觉拆码垛、无序抓取、轨迹引导(涂胶/焊接)、大目标定位、装配等专业解决方案。所有解决方案,均为可视化操作完成调试和生产部署。系统还提供了开放的SDK接口,可无缝对接各类设备,如机械臂/AGV/叉车/PLC/3D相机/MES系统等,可轻松扩展新的引导应用场景。系统提供深度学习本地训练工具,可轻松实现模型训练和部署。
系统优势
◆ 无需真实生产数据,提供3D数模即可实现识别模型的制作和部署。
◆ 支持各类袋状物体、半透明物体、刚性物体、软性物体在内的多种物体。
◆ 物料可无序摆放(倾斜,形变均可),也可指定垛型。
◆ 内置多种解决方案和模型,无需训练,0.5-3天快速部署。
系统功能
◆ 支持开放的相机标定/手眼标定功能。
◆ 可视化图像/点云/高动态功能。
◆ 模型制作/训练、模型部署和管理、生产模式功能。
◆ 深框功能、干涉判定、智能路径规划、在线/离线仿真功能。
◆ 适配常见机器人通讯协议,Ethernet IP/Profnet IP,适配主流国内外机器人。

 如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!



 CHN
CHN EN
EN